
发货:3天内
产品描述
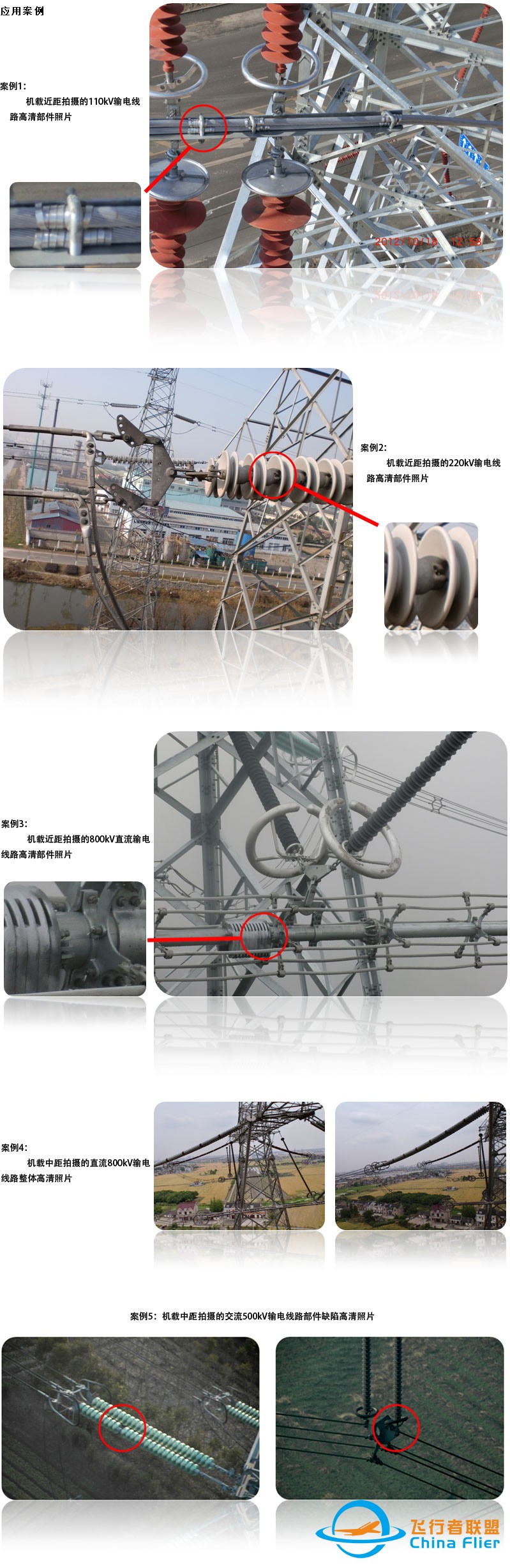
GC系列快速巡查无人机系统是一种专门针对电力行业输电线路空中巡视工作设计的新型的电能驱动多旋翼系列飞行器,它能搭载任务设备从空中对目标部件进行中、近距离定点监视和机动巡查。它不仅兼顾机动巡航和稳定悬停,而且具有良好的负载和滞空能力,安全性高、操作简单、易于携带、环保无污染、运行与维护成本低,快速响应能力好。适用于进行短途的电力线路故障应急巡查和缺陷快速查找。
系统基本组成
无人机载具及任务设备
地面站系统及配套保障设备

技术特点
两种工作模式——无人机具备人工操控(视距内)和自主巡航飞行两种模式,满足不同巡检要求。
自主起降功能——具备自主的起飞、返回、着陆功能,场地适应性好。
自主悬停功能——可在空中预定位置悬停、凝视、采集目标的影像资料,其他非旋翼类型无人机难以实现,提高了影像采集的质量。
自主巡航功能——可沿预定轨迹进行高精度的航迹跟踪飞行,使运行人员专心于影像采集设备的操控。
减震云台可调——可任意搭载高清照相和摄像设备,影像采集的质量高。
遥控调教对焦——具备相机遥控调焦或对焦功能,可提供微小目标物的拍摄清晰度。
防撞预警功能——具备巡查设施防碰撞预警功能,保障设施和无人机的安全。
地面实时监控——地面站系统可进行实时航迹规划或人工操控,易于运行人员监控无人机的飞行状态,地面站系统具备机载影像实时监视功能,可对云台及其内置影像采集设备实施远程操控,易于运行人员监控影像采集设备。
影像备份存储——地面站系统具备影像实时采集、传输、接受与存储功能。
不受高空管制——无人机体积小巧,飞行无噪声,对军用和民用航空设施设备无任何影响,尚不受限于空中管制。
经济效益显著——熟练使用本系统后,将能大大减轻日常与应急快速巡检的劳动强度,提高巡检的质量和效率,经济效益和社会效益显著。
专利支撑
面对称布局的多旋翼无人飞行器,发明 201110030943.5
新型面对称布局的多旋翼无人飞行器,实用新型 201120058970.9
基于多旋翼无人飞行器的输电线路巡检系统,发明 201110055423.X
基于多旋翼无人飞行器的输电线路巡检系统,实用新型 201120059552.1